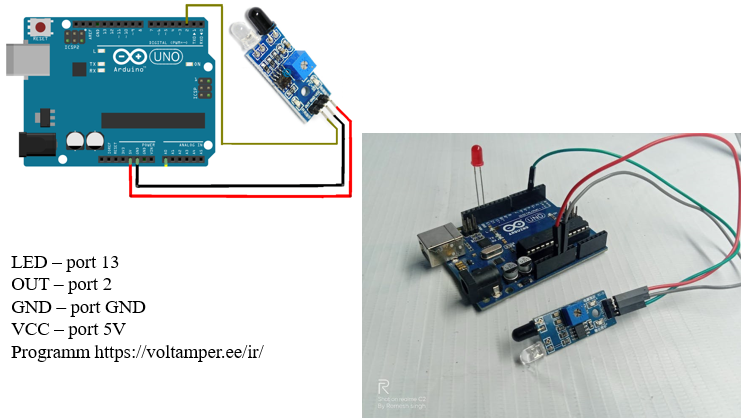
int IRSensor = 2; // connect ir sensor to arduino pin 2
int LED = 13; // connect Led to arduino pin 13
void setup()
{
pinMode (IRSensor, INPUT); // sensor pin INPUT
pinMode (LED, OUTPUT); // Led pin OUTPUT
}
void loop()
{
int statusSensor = digitalRead (IRSensor);
if (statusSensor == 1)
{
digitalWrite(LED, LOW); // LED LOW
}
else
{
digitalWrite(LED, HIGH); // LED High
}
}