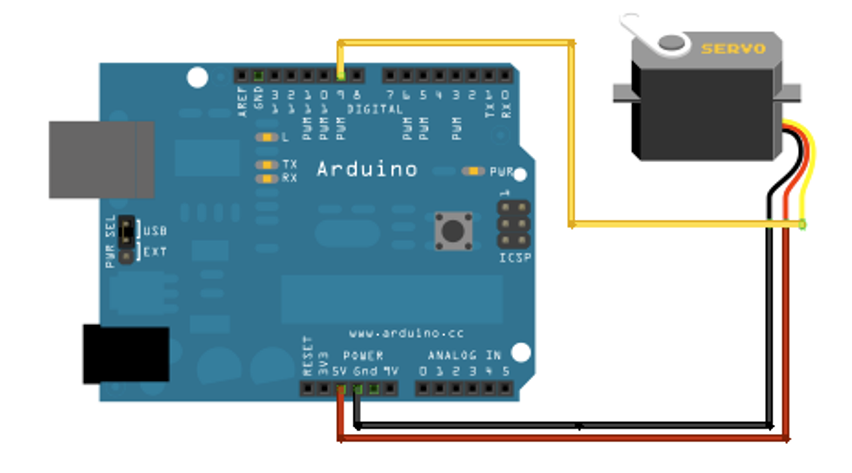
november 13, 2024 by admin #include <Servo.h> Servo servo; void setup() {servo.attach(9); }void loop() {servo.write(0);delay(500); servo.write(90);delay(500); servo.write(180);delay(500); servo.write(90);delay(500); servo.write(0);delay(500); }