Trafo ehitus ja tööpõhimõte.
Miks on enamikel trafo mähistel erinev keerdude arv?
Mis on galvaaniline eraldus ja miks on seda vaja?
Trafode jahutussüsteemid (nimetus ja kirjeldus).
Mis tingimused peavad olema täidetud, et trafod saaksid töötada paralleeltööl?
Mis vahe on trafol ja autotrafol?
Mis on pool, ning mis on pooli peamine ülesanne?
Mille järgi on võimalik pooli iseloomustada (nimetus ja kirjeldus)?
Mähise materjalina vask vs alumiinium (eelised, puudused).
Poolis olevad takistused nii DC kui AC süsteemis (nimetus ja kirjeldus).
Poolis olevad pinged nii DC kui AC süsteemis (nimetus ja kirjeldus).
Mis on induktiivsus?
Mis on solenoid ja selle liigid/tüübid?
Miks hoidesolenoid üle ei kuumene?
Pooli jadaühenduse valemid.
Pooli rööpühenduse valemid.
Mis vahe on sirge juhtme magnetväljal ja pooli magnetväljal?
Millest sõltub pooli magnetväli?
Mis on osalahendus ja kus see tekib?
Mis on dendriid (kirjeldus) ja mida nad põhjustavad?
Mis on vesipuud (kirjeldus) ja mida nad põhjustavad?
Nimeta mis võib põhjustada osalahenduste mõõtmisel müra?
Miks on vaja osalahendustega tegeleda?
Mis on skeem?
Skeemide liigitus?
Mis peab olema skeemile kantud?
Mis on tingmärk ning miks see on vajalik?
Vigane skeem või vigane ehitus?
Elektriskeemi ja elektroonikaskeemi erinevus?
Mis on lühis?
Lühise liigid?
Miks on vajalik selektiivsus?
Selgita metallurgilise efekti vajalikkust.
Bimetallvabasti vs elektromagnetvabasti.
Kirjelda rikkevoolukaitselüliti tööpõhimõtet.
Elektrivoolu toime inimesele.
Erinevad võimsused (nimeta ja kirjelda).
Elektriseadmete ohutusklassid (nimeta ja kirjelda).
9A, 9B, 9C, 9D vooluringi kontrolltöö küsimused
Mis on vool?
Mis on pinge?
Mida tähendab, kui kahe punkti vahel on pinge 1V?
Mis on voolu, pinge ja takistuse ühik?
Kuidas ühendame skeemi ampermeetri?
Kuidas ühendame skeemi voltmeetri?
Milleks kasutatakse skeemis ampermeetrit?
Milleks kasutatakse skeemis voltmeetrit?
Kasuta skeemi analüüsi küsimuses olevat skeemi ning joonista sellele skeemile kõik kohad kuhu saab panna ampermeetrid ja voltmeetrid.
Skeemil on toiteallikana keemiline vooluallikas. Mille järgi otsustad milline on keemilise vooluallika positiivne klemm ja milline on keemilise vooluallika negatiivne klemm?
Mis osa vooluringis ühendab toiteallika tarbijaga ning miks valisid just selle?
Vooluringi saab kujutada kas avatuna või suletuna. Kummas vooluringis liiguvad laetud osakesed, tekib pinge ja vool? Selgita miks nii vastasid.
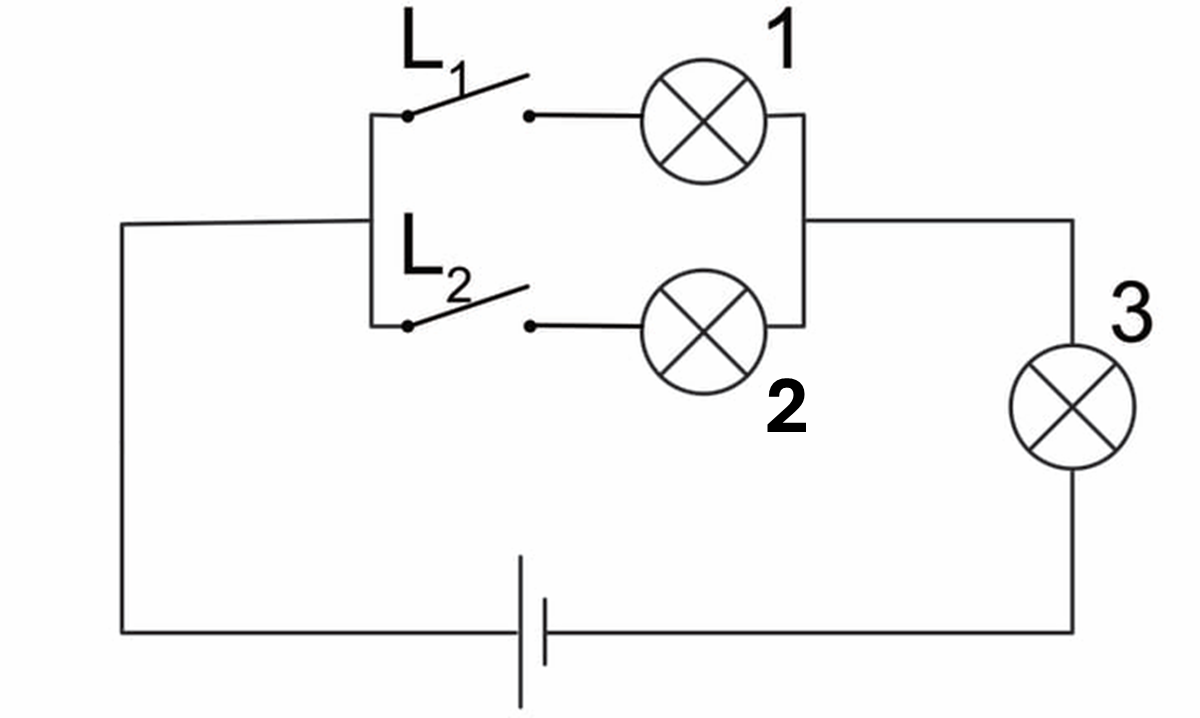
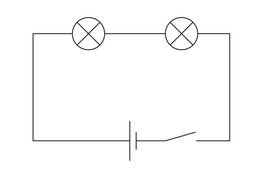
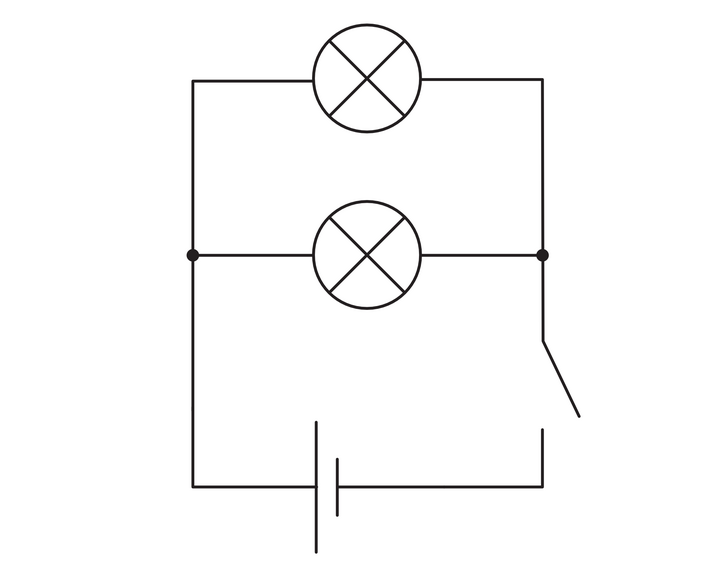
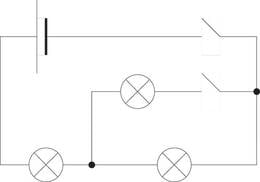
Analüüsi toodud elektriskeemi ning kirjuta selle kohta välja kogu info mida on võimalik sellelt skeemilt välja lugeda. (Kontrolltöös on üks skeem)
Tunnis rääkisime erinevatest toiteallikatest. Too näited milline energia võib olla toiteallika sisendiks?
Takistus ja takisti – sama asi või erinevad? Selgita.
Milline on kokkuleppeline voolu liikumise suund vooluringis?
Miks sama toiteallika korral võib erinevates vooluringides vool olla erinev?
Millal vooluringis kaob vool, kuid pinge jääb alles?
Kui vooluring on katkestatud/avatud, siis pinget ei ole?
Miks on patarei klemmide vahel pinge, isegi siis, kui vooluring ei ole ühendatud?
(Kontrolltöös võivad olla teised numbrid)
Juhti läbis 4 minuti jooksul vool.
Juhi pikkus on 2 m.
Juhi ristlõikepindala on 2,5 mm².
Selle aja jooksul liikus läbi juhi 120 C laengut.
Juhi takistus oli 6 Ω.
Elektriväli tegi 360 J tööd.
Toiteallika pinge on 9 V.
Juhiga on ühendatud tarbija võimsusega 25 W.
Antud andmete hulgast vali välja ainult need andmed, mida on vaja ülesande lahendamiseks. Ülejäänud andmed jäta tähelepanuta.
Arvuta antud andmete põhjal vool?
Arvuta antud andmete põhjal pinge?
Elektrijuhid ja dielektrikud (isolaatorid)
Laengud
Mõõtmised
04.02.2026 kontrolltöö küsimused
- Mida mäletad ohutuse loengust?
- Mis on mõõtmine?
- Miks mõõtmise tulemusena ei piisa ainult arvust ilma ühikuta?
- Mis on otse- ja kaudnemõõtmine?
- Mis on SI-süsteem ja miks seda kasutatakse?
- Mis on etalon?
- Miks on ilma etalonita mõõtmine problemaatiline?
- Mis juhtub kui mõõtmisviga kandub edasi arvutustesse?
- Mis nimeline on teadusharu, mis uurib mõõtmisi ja mõõtühikuid?
- Mis on tõeline väärtus?
- Mis on mõõtetulemus?
- Mis on mõõteviga?
- Kas on võimalik täiesti täpselt mõõta?
- Nimeta ja selgita peamised mõõtevigade allikad?
- Mille poolest erinevad elektromehaanilised ja digitaalsed mõõteriistad?
- Mis on taatlemine?
- Mis on kalibreerimine?
- Mis vahe on kalibreerimisel ja taatlemisel?
- Mis on elektrilaeng?
- Millal on aatomi laeng neutraalne?
- Mis vahe on elektroni ja prootoni laengul?
- Kui keha loovutab elektrone siis milliseks muutub antud keha laeng?
- Elektrilaengu jäävuse seadus?
- Süsteemi laeng on 0C ja ühe keha laeng on -3C siis kui suur on teise keha laeng?
- Mida kirjeldab Coulombi seadus?
- Eeldused Coulombi seaduse kehtivuseks?
- Miks ei saa kasutada Coulombi seadust kasutada elektrijuhis?
- Mis on elektrijuht?
- Mis on dielektrik (isolaator)?
- Mis ülesanne on elektrijuhtidel?
- Mis ülesanne on dielektrikutel (isolaatoritel)?
Esimese kontrolltöö küsimused 2025/2026
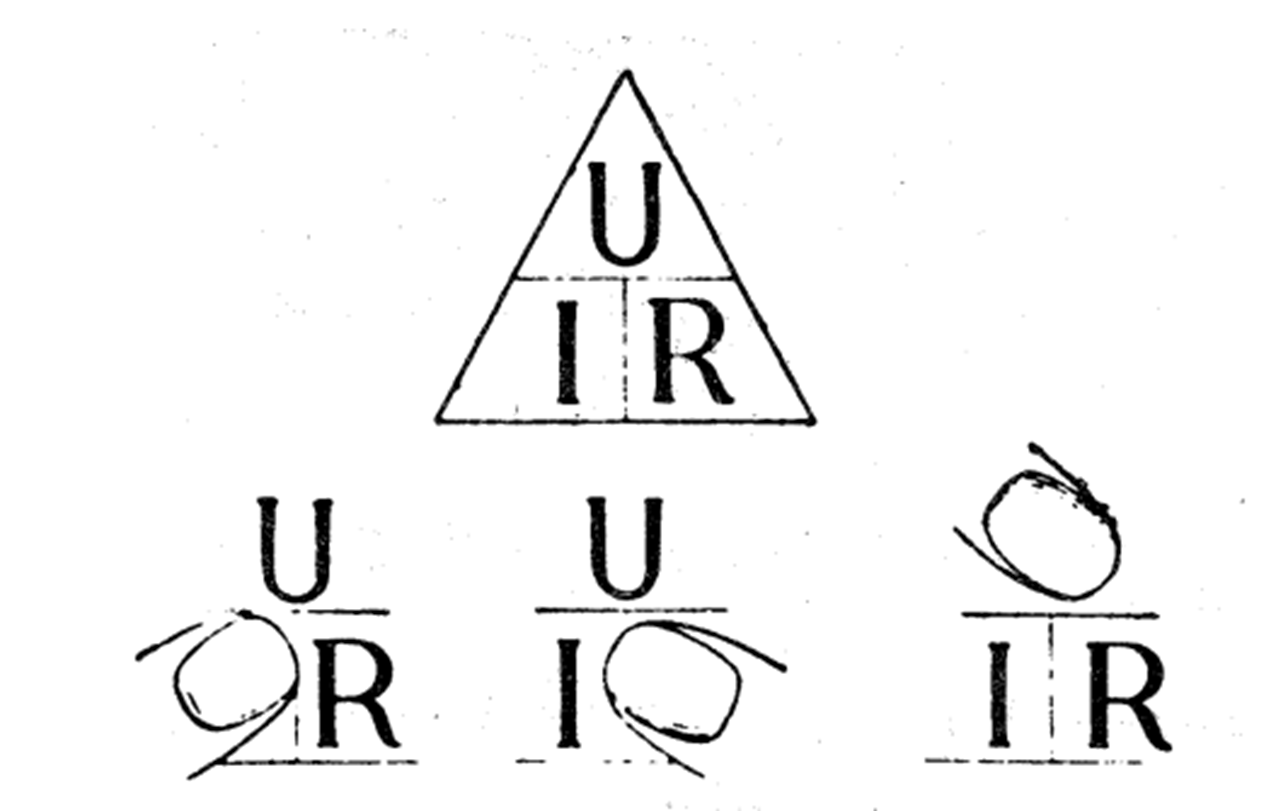
Mis kolmnurgaga on tegu ja kuidas seda kasutada?

Mida nimetatakse liinipingeks ja kuidas seda mõõta?
Mida nimetatakse faasipingeks ja kuidas seda mõõta?
Alalispingel ja vahelduvpingel on mõlemal pinge ja aja sõltuvuse graafik. See tähendab, et mõlema pinge graafik on samasugune? Joonista graafikud.
Mis on mõõtmine ja kuidas need jagunevad?
Kuidas tekib/tuleneb faasinihe?
Takistus vs takisti.
Kas ühes ja samas kolmefaasilises ahelas on võimalik mõõta nii liinipinget kui ka faasipinget? Selgita.
Kuidas saad teada kui suur takistus on takistil?
Missugust mõõtühikute süsteemi kasutatakse Eestis?
Mõõtetulemuse vigu põhjustavad?
Mahutavus vs mahtuvus.
Mis on kondensaator ning kuidas seda ehitatakse?
Milline on alalispinge pinge ja aja sõltuvuse graafik? Näide/skeem.
Milline on vahelduvpinge pinge ja aja sõltuvuse graafik? Näide/skeem.
Kuidas ühendatakse voltmeeter skeemi? Näide/skeem.
Kui suur on faasinihe kolmefaasilises süsteemis ning kas kuuefaasilises süsteemis on sama suur faasinihe?
Kas koormusega on võimalik lülitada lülitit ja tõmmata pistikut välja pistikupesast ilma, et tekiks elektrikaar? Põhjenda.
Elektrotehnika kõige tähtsam seadus. Miks valisid just selle seaduse?
Kaks õpilast panevad kokku elektriskeemid ühe ja sama joonise järgi. Kui skeemid on koos teostavad nad mõõtmised kasutades kumbki oma skeemi ja mõõteseadet. Kas õpilaste mõõtmised on identsed? Põhjenda.
Kuidas ühendatakse ampermeeter skeemi? Näide/skeem.
Kuidas teha 3 faasilisest süsteemist 1 faasiline süsteem?
Õpilane valib endale meelepärase elektrijaama (elektritootmise järgi) ning selgitab etapiviisiliselt kuidas toimub elektrijaamas elektri tootmine. Mida põhjalikum seda parem.
Miks on peamine elektrisüsteem 3 faasiline mitte nt 1 või 6 või 12 faasiline?
Millest sõltub takistus?
Mida nimetatakse eritakistuseks?
Mida nimetatakse jadaühenduseks ning kuidas arvutatakse jadaühenduse suurusi. Näide/valemid/skeem.
Mida nimetatakse paralleelühenduseks (rööpühenduseks) ning kuidas arvutatakse paralleelühenduse (rööpühenduse) suurusi? Näide/valemid/skeem.
Mida nimetatakse segaühenduseks ning kuidas arvutatakse segaühenduse suurusi? Näide/valemid/skeem.
Mis on energia jäävuse seadus ning kuidas see kehtib elektrisüsteemis (energiasüsteemis)?
Milline on liinipinge ja faasipinge omavaheline suhe?
Mis on sulavkaitse?
Rikkevool on alati lekkevool, kuid lekkevool ei ole alati rikkevool.
Mille järgi valida peakaitsme suurus?
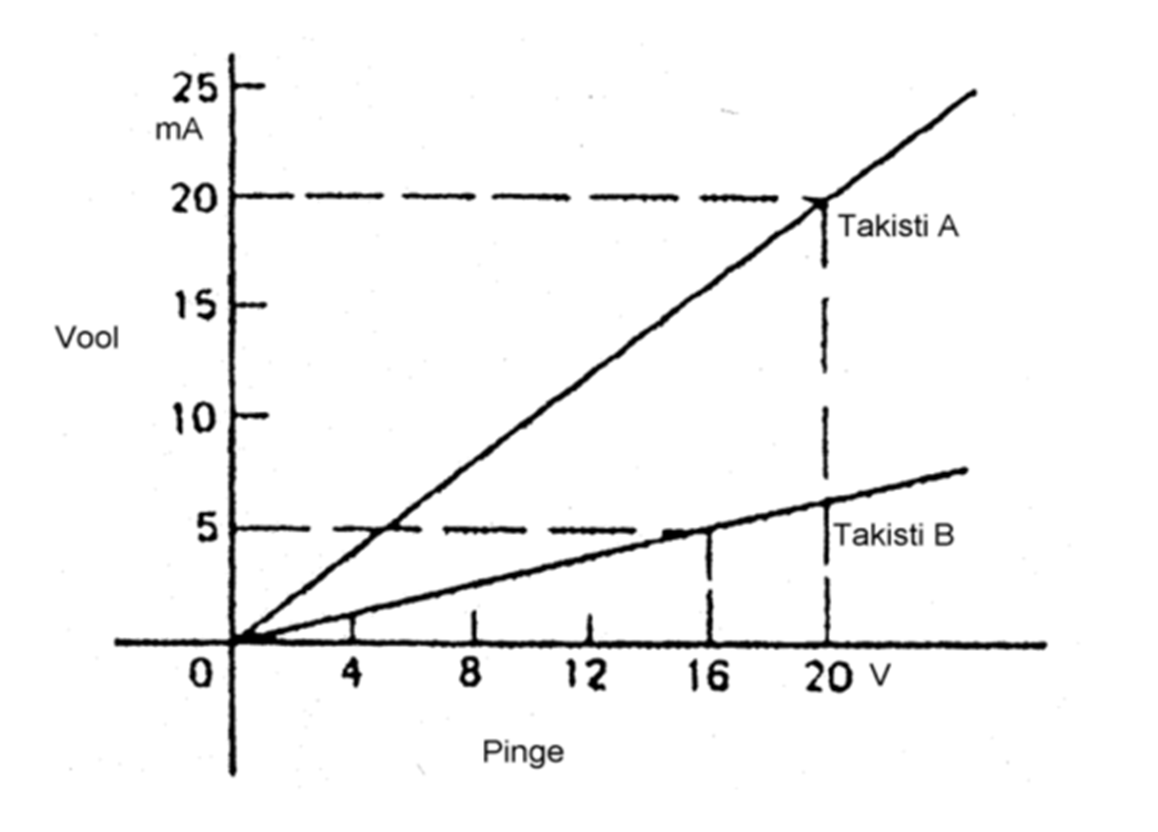
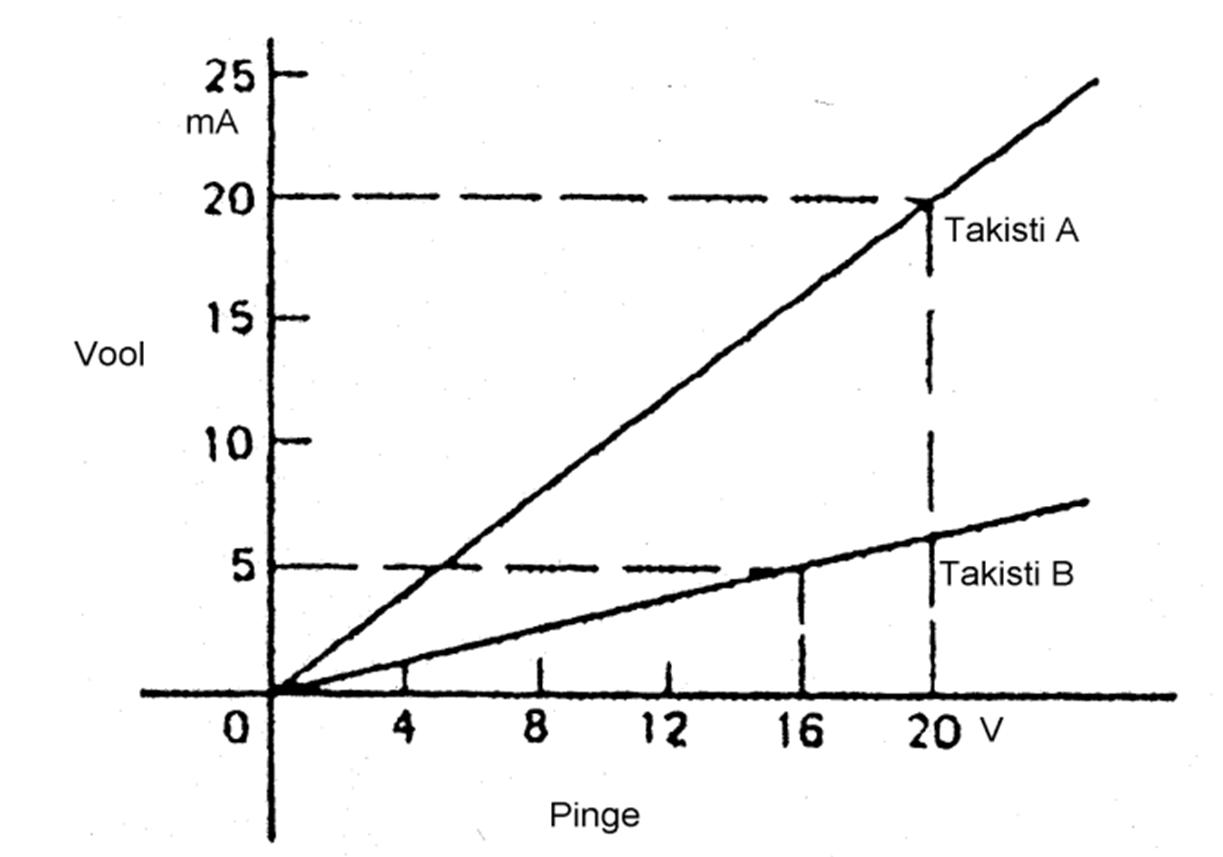
Mis graafikuga on tegu?
Mis on magnet?
Kas magnetit on võimalik jagada nii, et tekiks ainult 1 poolus? Selgita.
Mis on magneti põhiomadused?
Selgita magnetiseerimise protsessi?
Selgita demagnetiseerimise protsessi?
Mis on Curie temperatuur ning too näiteid?
Nimeta magnetite tüübid?
Selgita kruvireeglit.
Mida sab selgtiada noolega?

Selgita vasaku käe reeglit?
Selgita parema käe reeglit?
Ajakonstant 𝜏(loetakse “tau”) – selgita.
Kondensaatorite jadaühendus ja selle valemid?
Kondensaatori paralleelühendus ja selle valemid?
Kondensaatori segaühendus ja selle valemid?
Aine kontrolltöö – 9B füüsika
Mass, kaal ja gravitatsioon
Kas mass ja kaal on sama asi teise nimega? Põhjenda.
Selgitage, miks inimene saab poest ostetud kaalul sama näidu Maal ja Kuul, kuigi kaal on erinev.
Arvutage 60 kg inimese kaal Maal, Kuul ja Jupiteril.
Kui inimene tõuseks kosmoselaevas Maa orbiidile, oleks ta seal „kaaluta olekus“. Kas tal oleks siis mass ja miks?
Tihedus ja ujuvus
Teil on kolm ainet: raud (ρ = 7800 kg/m³), puit (ρ = 600 kg/m³) ja alumiinium (ρ = 2700 kg/m³). Arvutage, kui suur on 1 liitri (1 dm³) iga aine mass.
Selgitage, milline neist upub, milline ujub ja milline võib sõltuvalt kujust või ehitusest käituda mõlemat moodi.
Põhjendage, miks metallist laev võib ujuda, aga sama metallklots upub.
Tahke aine kokkusurumine
Selgitage osakeste tasemel, miks tavalist tahket ainet (nt laud, metallklots) ei saa poole õhemaks suruda.
Miks saab aga käsna kergesti kokku suruda, kuigi on samuti tahke aine?
Too elulisi näiteid, kus inimene kasutab ära/inimese jaoks on eluliselt tähtis tahke aine vähest kokkusurutavust või jäikust.
Vesi ja jää eripära
Selgitage, kuidas molekulide paigutus muutub, kui vesi külmub jääks.
Miks on jää tihedus väiksem kui vee oma? Tooge välja, milline seos on vesiniksidemetel ja kristallvõrel.
Analüüsige: millised oleksid tagajärjed loodusele ja inimesele, kui jää oleks veest tihedam?
Difusioon, soojusliikumine ja soojuspaisumine
Soojusliikumine ja soojuspaisumine on sama asi teise nimega. Kas see väide on õige? Põhjenda.
Selgitage, miks difusioon toimub gaasis kiiremini kui vedelikus, ja miks tahkes aines peaaegu üldse mitte.
Tooge elulisi näiteid, kus difusiooni kiirus mõjutab meid igapäevaelus (vähemalt 2 erinevast olekust – gaas ja vedelik).
Kuidas mõjutab temperatuuri tõus difusiooni kiirust? Selgitage osakeste liikumise energia seisukohast ja tooge vähemalt üks eluline näide.
Aine kontrolltöö – 9 klassi füüsika
Mis on aine? Too vähemalt kolm näidet nii, et nende seas oleks nii lihtaine kui liitaine.
Kui ostad poest kaalu ja kaalud ennast, siis saad numbrilise näidu. Mida see number sulle ütleb? Põhjenda.
Kujuta ette, et oled Kuul. Sinu mass on endiselt sama, aga kuidas muutub sinu kaal? Kas see muutub ainult sellepärast, et oled Kuul? Miks?
Miks võid talvel autoga raudtee ületusel näha rööbaste vahede juures tühikuid (vahet)?
Kui paned tilga tinti klaasi vette, siis mõne aja pärast on kogu vesi ühtlaselt värviline. Mis nähtus see on ja miks see toimub?
Kui klassis avab keegi parfüümipudeli, jõuab lõhn varsti igaüheni. Miks gaasides levib difusioon palju kiiremini kui vedelikes?
Mis juhtub vee molekulidega, kui temperatuur langeb alla 0 °C ja vesi muutub jääks? Miks on jää tihedus väiksem kui vedelal veel?
Kas ainult keemilise valemi põhjal saab öelda, mitu aatomit on ühes molekulis? Kui jah – põhjenda. Kui ei – põhjenda.
Miks kuld on alati kuld – sõltumata sellest, kas ta on ehtes, mündis või tolmuna?
Too näide ainest, mis koosneb üksikutest aatomitest ja ainest, mis koosneb molekulidest.
Kas mass ja kaal on sama asi teise nimega? Põhjenda.
Selgita, mis on aine tihedus ja miks see on materjalide valikul oluline.
Too iga oleku (tahke, vedel, gaasiline) kohta üks iseloomulik omadus. NB! Sama omadust ei tohi korrata.
Mis määrab millise ainega on tegu? Too näited.
Missugustele tingimustele peab molekul vastama? Kuidas ehitada molekuli?
Klassilaua paksus on 2 cm. Kas saaksid selle laua poole õhemaks (1 cm paksuseks) kokku suruda? Kui jah – põhjenda. Kui ei – põhjenda.
Missugust olekut (tahke, vedel, gaasiline) saab kõige paremini kokku suruda ja paisutada? Põhjenda.
Milline osake määrab ära, mis ainega on tegemist? Too 2 näidet.
Mis on keha ruumala ja mis on selle SI-ühik? Kõikidel ainetel on kindel ruumala?
Mis osakesed moodustavad aatomi ja millised on nende laengud?
Mis on kristallvõre? Nimeta vähemalt kaks kristallvõre tüüpi ja nende omadusi.
Teise kontrolltöö küsimused
Mis vahe on akul ja patareil?
Nimeta erinevaid akusid (akutehnoloogiaid)?
Millised on aku parameetrid?
Joonista vooluring ning selgita mitmest osast see koosneb?
Mis kolmnurgaga on tegu ja kuidas seda kasutada?
Mis graafikuga on tegu?
Mis on Joule-Lenzi seadus?
Joonista pingejagur ning selgita kuidas ta töötab?
Mis on elektromotoorjõud ja kus see tekib?
Mis on pinge ja kus see tekib?
Nimeta meetodeid kuidas kõrvaliste jõudude poolt saadakse/muundatakse elektrienergia?
Millal kasutatakse allikate jada-, rööp- ja segaühendust?
Mille poolest erinevad lineaartakisti ja mittelineaartakisti?
Mille poolest sarnanevad ja erinevad termistor ja posistor?
Elementaarlaeng
Eeldused Coulombi seaduse kehtivuseks?
Mis on magnet?
Kas magnetit on võimalik jagada nii, et tekiks ainult 1 poolus? Selgita.
Mis on magneti põhiomadused?
Mis on magnetdomeenid ja nende roll?
Selgita magnetiseerimise protsessi?
Selgita demagnetiseerimise protsessi?
Mis on Curie temperatuur ning too näiteid?
Nimeta magnetite tüübid?
Kuidas on võimalik elektromagnetil suurendada/võimendada magnetvälja?
Selgita kruvireeglit?
Mida saab selgitada noolega?

Selgita vasaku käe reeglit?
Elektromagneti külgetõmbejõud?
Selgita parema käe reeglit?
Mis on lühis?
Lühise ligiid ehk millised lühised tekivad elektrivõrgus?
Dendriidide ja vesipuu sarnasused ja erinevused?