#include <Servo.h>
int pos=random(0,180);
Servo servo;
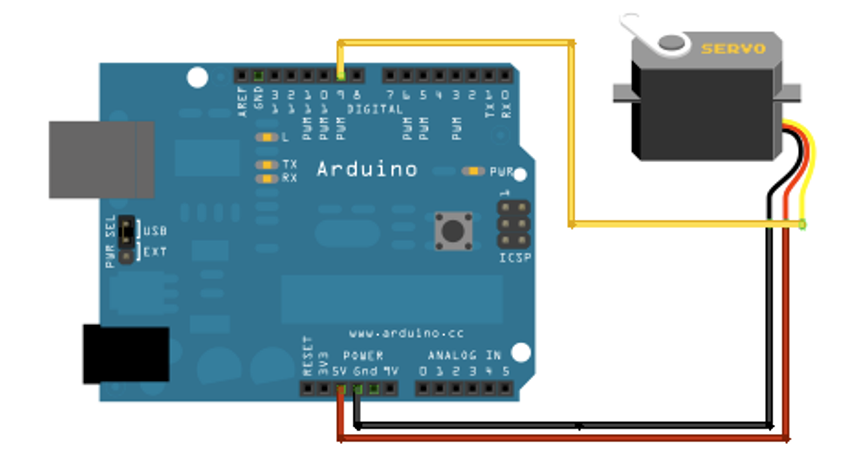
void setup(){servo.attach(9);}void loop(){servo.write(pos);pos=random(0,180);delay(300);}